How to store multiple poses? - General Application Help: How do I? - Universal Robots Forum
By A Mystery Man Writer

Hi, I need to store multiple positions/poses of the robot to access them later in the program. The number of positions depends on the user input - the query works perfectly. I thought I could just make a loop and fill each pose into an array but it does not work. I know how to store a pose in a single variable but in my application the user decides how many poses he needs to store. Can anyone shed some light here? Thanks and best regards Stephan PS: oh and where can I change my username to

Some AI research areas and their relevance to existential safety — AI Alignment Forum

Move the robot to the position which is sent from the PLC - General Application Help: How do I? - Universal Robots Forum

Direction until distance - Technical Questions - Universal Robots Forum
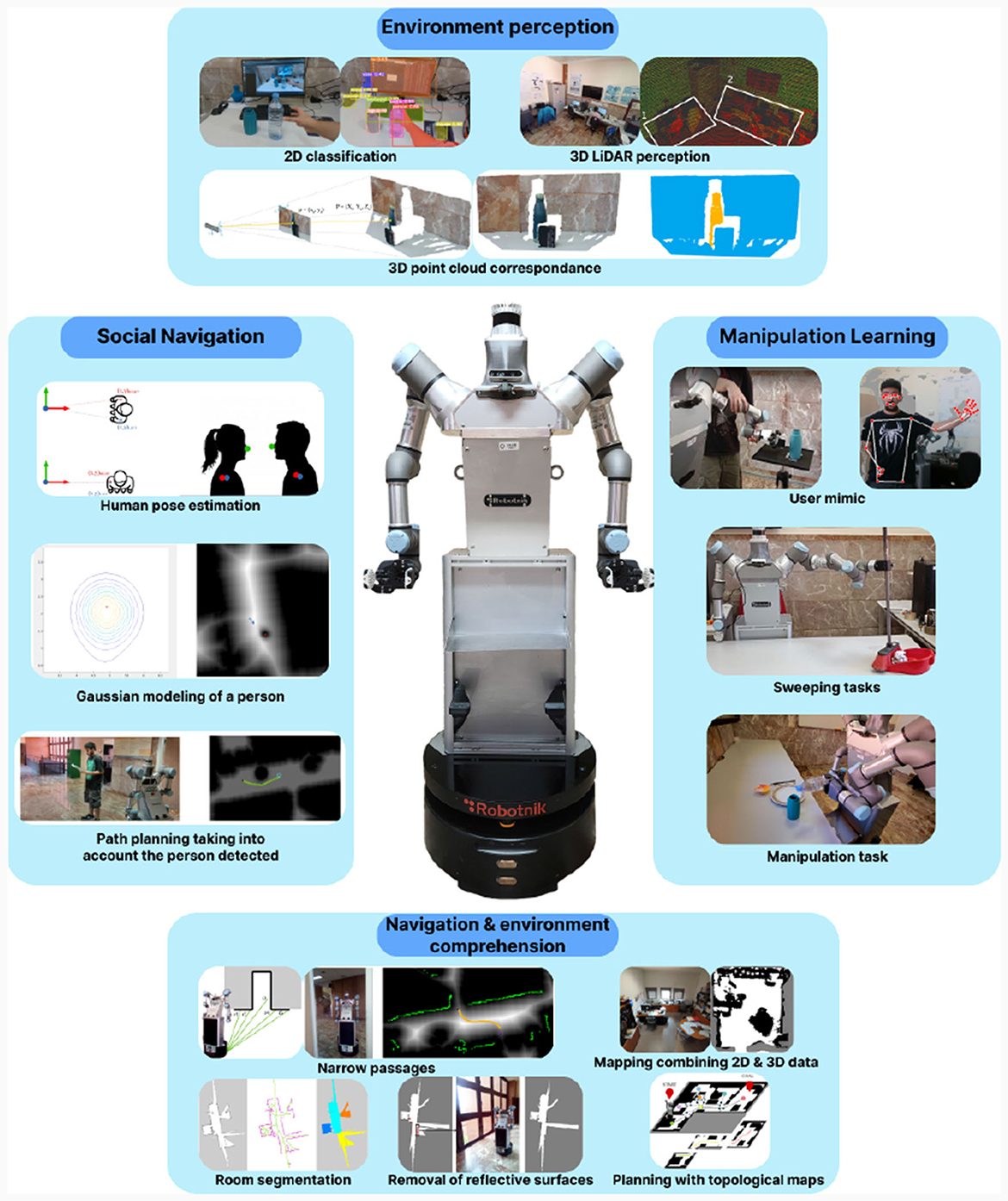
Frontiers ADAM: a robotic companion for enhanced quality of life in aging populations
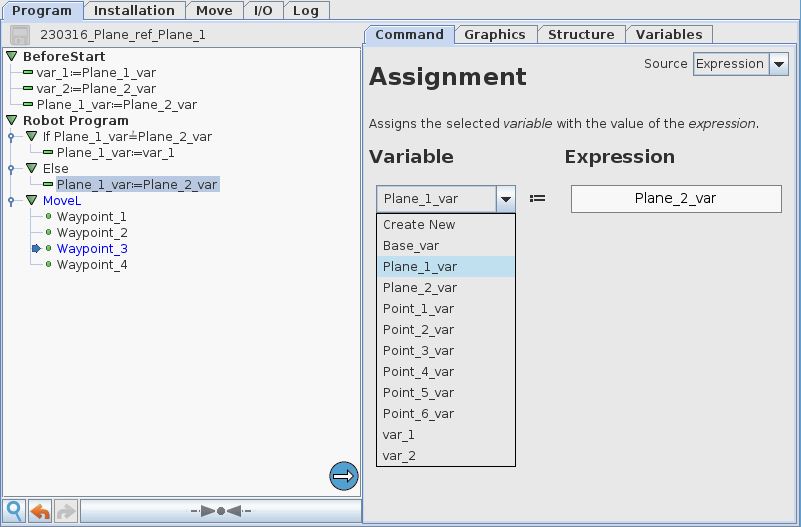
Planes and position variables 1 – UR Forum-Help-Q&A
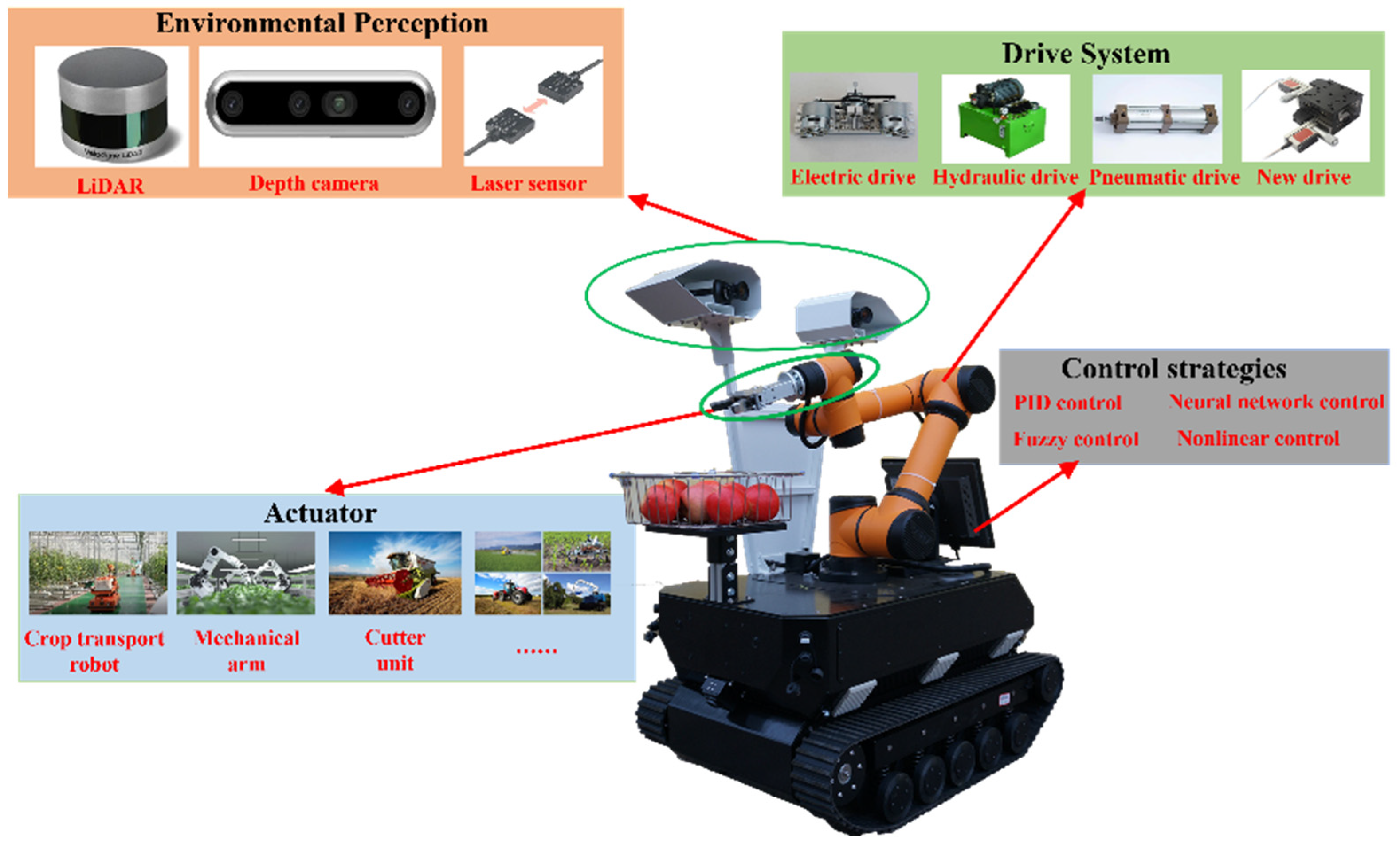
/machines/machines-10-00913/article_de

Can't save program in VirtualBox - Technical Questions - Universal Robots Forum

5 robotics predictions for 2023
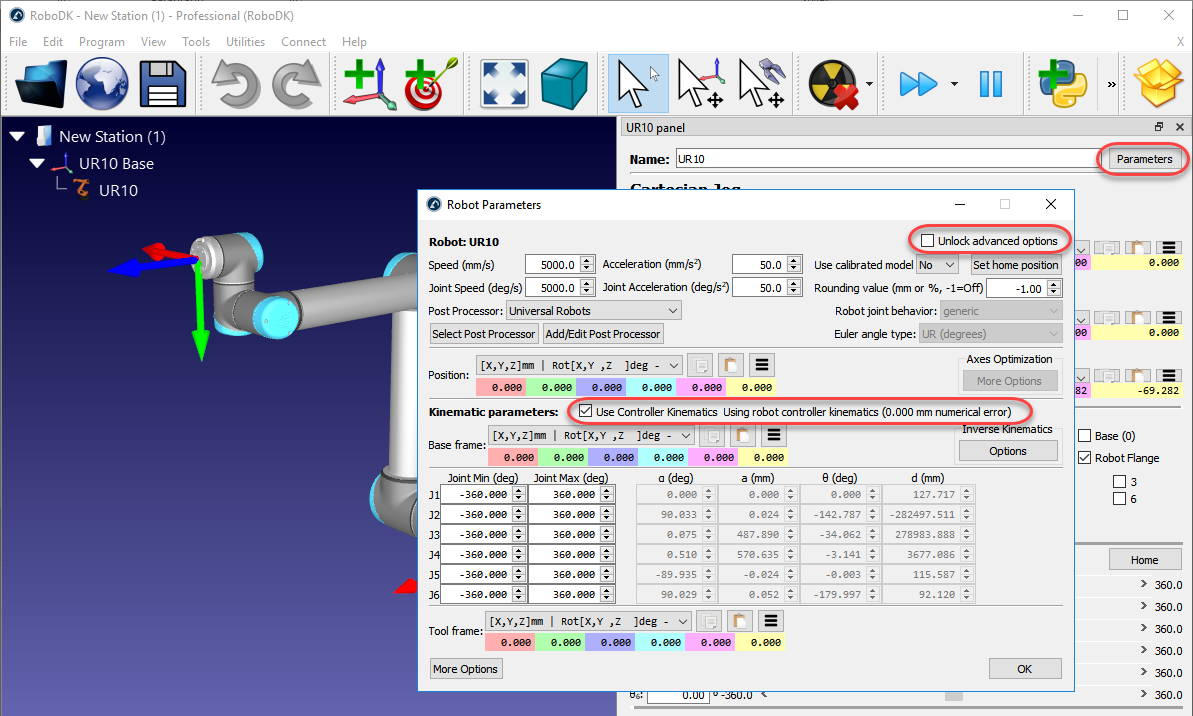
Universal Robots - RoboDK Documentation

Amazing takeaway from #A3Forum2024! Robotics creates jobs in manufacturing!, Jake Hall posted on the topic

Move with Offset - Product Wishlist - Universal Robots Forum
Accelerating Robotics Simulation with NVIDIA Omniverse Isaac Sim
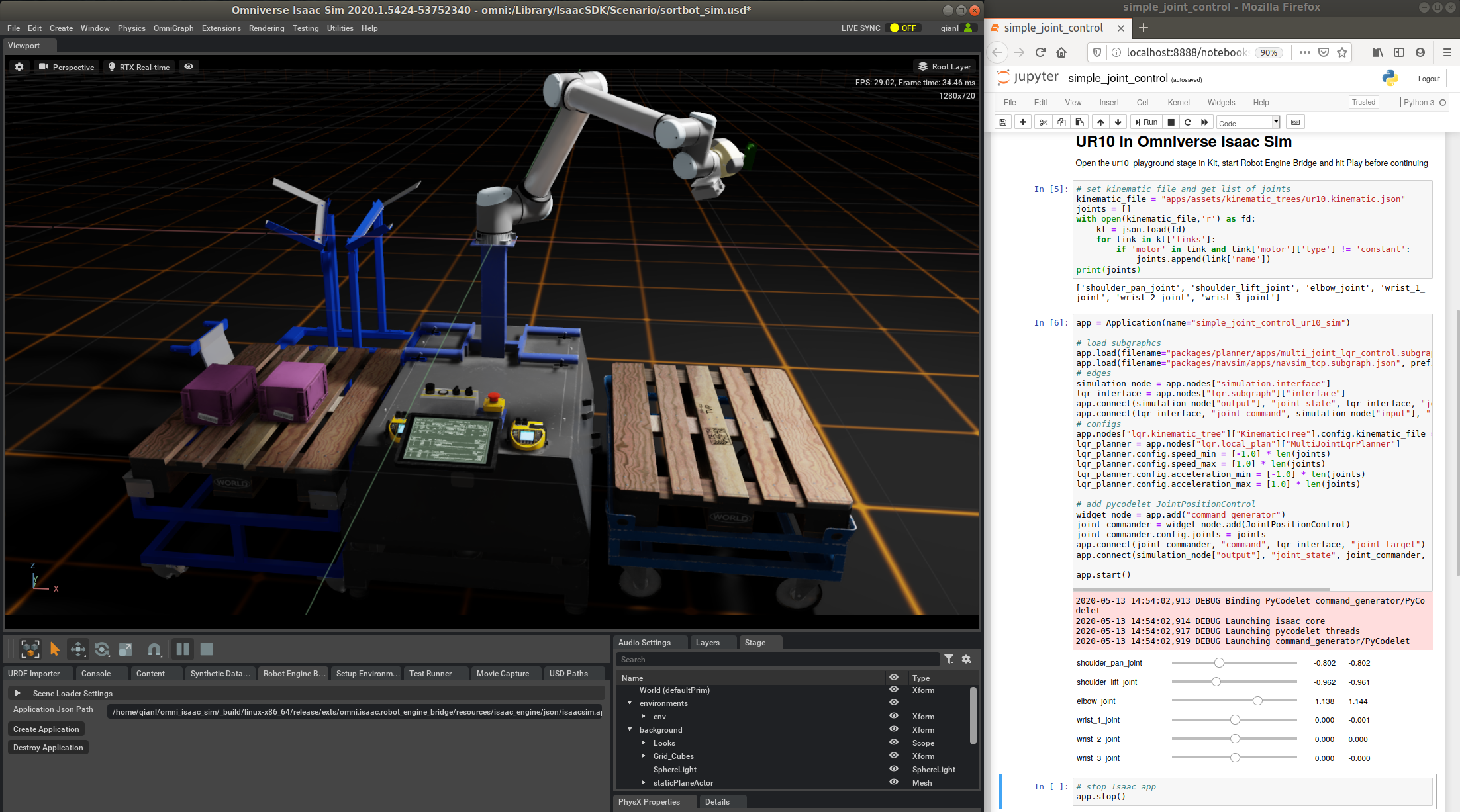
Developing Robotics Applications in Python with NVIDIA Isaac SDK

How do I rotate the wrist 360 with a tcp respected? - General Application Help: How do I? - Universal Robots Forum

media.springer/full/springer-static/imag